






การเรียนกายวิภาคสำหรับนิสิตคณะสัตวแพทยศาสตร์ จุฬาฯ ต้องอาศัยการจดจำกล้ามเนื้อส่วนต่าง ๆ ผ่านร่างสุนัขอาจารย์ใหญ่ แต่นิสิตมักพบปัญหาร่างอาจารย์ใหญ่ชำรุดเสียหายไปเรื่อย ๆ เนื้อเยื่อแข็งตัวทำให้งอขยายได้ไม่เต็มที่ ส่งผลให้คุณภาพร่างไม่สม่ำเสมอ รวมทั้งการขาดแคลนร่างสุนัขจริง ทำให้เป็นอุปสรรคในการเรียนการสอน

ผศ.สพ.ญ.ภาวนา เชื้อศิริ จากภาควิชากายวิภาคศาสตร์ คณะสัตวแพทยศาสตร์ จุฬาฯ พร้อมด้วยนายภักดี สุถนอม นางจันทิมา อินทรปัญญา บุคลากรในภาควิชาฯ และนายกฤตยชญ์ เชื้อศิริ นิสิตคณะนวัตกรรมสื่อสารสังคม มหาวิทยาลัยศรีนครินทรวิโรฒ ได้คิดค้นผลงานนวัตกรรมหุ่นกายวิภาคของกล้ามเนื้อสุนัขแบบโต้ตอบได้เพื่อแก้ปัญหาในการเรียนกายวิภาค ซึ่งสร้างความภาคภูมิใจให้แก่จุฬาลงกรณ์มหาวิทยาลัยและประเทศไทยด้วยการคว้ารางวัลระดับนานาชาติจากงาน 7th International Exhibition, INVENTCOR 2026 ณ ประเทศโรมาเนีย มาได้ถึง 5 รางวัล ได้แก่
• INVENTCOR 2026 Gold Medal Award (INVENTCOR 2026)
• INVENTCOR 2026 Best Category Award (Veterinary Medicine – Category G) - certificate & trophy
• Special Award จาก World Invention Intellectual Property Associations (WIIPA) - certificate & medal
• Special Award by Haller Pro Inventio Foundation, Poland - certificate & medal ประเทศโปแลนด์
• Special Award by National University of Science and Technology POLITEHNICA Bucharest, Romania - certificate only ประเทศโรมาเนีย

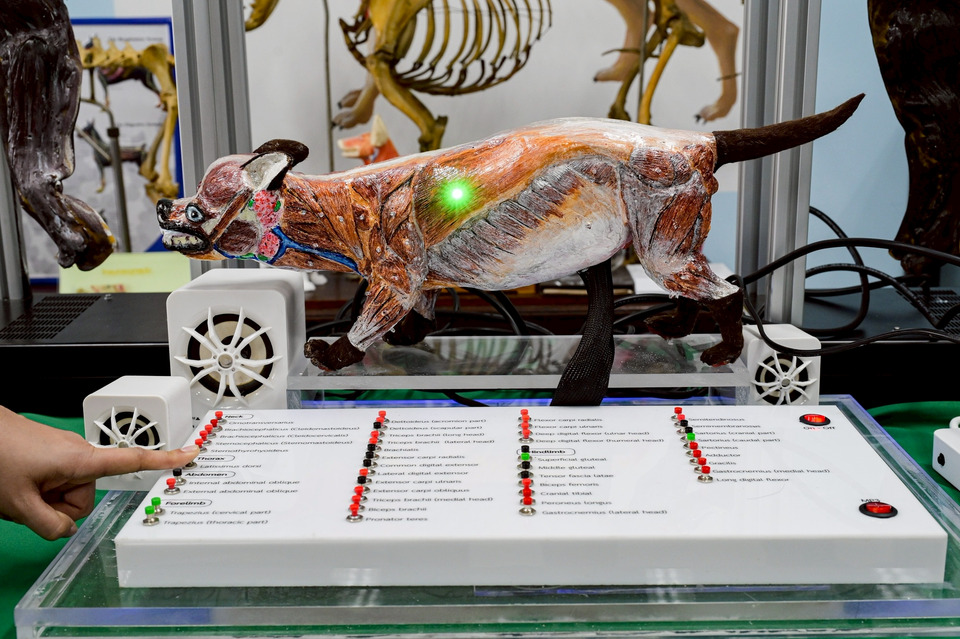
การที่ได้รับรางวัลเหรียญทอง (Gold Medal) และรางวัลยอดเยี่ยมที่สุดในสาขา Best Category Award: Veterinary Medicine เป็นสิ่งยืนยันการยอมรับว่าเป็นผลงานที่ดีที่สุดในสาขาสัตวแพทย์ ผลงานนวัตกรรมหุ่นกายวิภาคของกล้ามเนื้อสุนัขแบบโต้ตอบได้เป็นนวัตกรรมที่ใช้ในการเรียนการสอนกายวิภาคในนิสิตคณะสัตวแพทยศาสตร์ จุฬาฯ ระบบการทำงานเป็นแบบคู่ (Dual-Model) ประกอบด้วย หุ่นแบบ A (LED Topography) เป็นหุ่นสุนัขพันธุ์ชิวาวาขนาดเท่าตัวจริง ติดตั้งไฟ LED 43 จุด ตลอดตัวด้านซ้าย ผู้เรียนสามารถกดปุ่มชื่อกล้ามเนื้อภาษาอังกฤษเพื่อให้ไฟสว่างตามตำแหน่งจริง โดยแยกสีตามหน้าที่ทางสรีรวิทยาอย่างชัดเจน สีแดงเป็นกลุ่มงอทั้งหมด 27 จุด สีดำเป็นกลุ่มเหยียดทั้งหมด 11 จุด และสีเขียวเป็นกลุ่มหุบหรือกางทั้งหมด 5 จุด พร้อมระบบเสียงบรรยาย MP3 เสมือนมีอาจารย์ช่วยสอนอยู่ข้างๆ หุ่นแบบ B (Biomechanical Simulation) เป็นการจำลองกลไกการเคลื่อนที่อัตโนมัติของรยางค์ขาหน้าและขาหลังของสุนัขพันธุ์ไทย หุ่นสามารถจำลององศาการงอเหยียดได้แม่นยำตามหลักกายวิภาค เช่น ข้อศอกที่ 36-166 องศา และข้อเข่าที่ 41-162 องศา ช่วยให้นิสิตเห็นภาพการทำงานของกล้ามเนื้อในขณะสุนัขเคลื่อนไหวจริง ซึ่งร่างอาจารย์ใหญ่ทำไม่ได้
ผศ.สพ.ญ.ภาวนา อธิบายว่า “หุ่นแบบ A จำลองมาจากชิวาวาซึ่งเป็นสุนัขขนาดเล็กมีสรีระสวยงาม ชัดเจน เคลื่อนย้ายได้สะดวก ส่วนหุ่นขาหน้าและขาหลังแบบ B จำลองจากสุนัขพันธุ์ไทยแสดงการงอและเหยียดของข้อต่อต่าง ๆ ได้ตามองศามาตรฐานจริง ได้แก่ ข้อสะโพก ข้อเข่า และข้อเท้า รวมถึงส่วนขาหน้าที่แสดงการทำงานของหัวไหล่ ข้อศอก และข้อมือ”

“หุ่นถูกคิดค้นมาตั้งแต่ปี 2568 เราได้ทุนสนับสนุนจากโครงการวิจัยของคณะสัตวแพทย์ จุฬาฯ และนำมาใช้กับนิสิตคณะสัตวแพทย์ จุฬาฯ ปี 1 ในวิชากายวิภาคศาสตร์ (Anatomy 1) พบว่าคะแนนความรู้ของนิสิตหลังใช้งานเพิ่มขึ้นจาก 37% เป็น 93% ความพิเศษ คือ เรานำวัสดุเหลือใช้คือฝาขวดพลาสติกและโฟมมาใช้ในการสร้างหุ่น โดยมีตัวประสานคือเรซิน การประยุกต์ใช้ยางพาราเพื่อให้ข้อต่อต่าง ๆ ขยับงอเหยียดได้ และห่อหุ้มด้วยผ้าชนิดพิเศษเพื่อให้มีความสมจริงมากยิ่งขึ้น อีกทั้งเป็นการลดการนำเข้าสื่อการสอนจากต่างประเทศ”
ปัจจุบันผลงานนวัตกรรมหุ่นกายวิภาคของกล้ามเนื้อสุนัขแบบโต้ตอบได้นี้ยังได้รับความสนใจและผู้วิจัยมีแผนนำไปใช้อบรมตามศูนย์ฝึกสุนัขอีกด้วย
ผศ.สพ.ญ.ภาวนา เล่าว่า “อาจารย์พบปัญหาเวลาไปสอนการอบรมปฐมพยาบาลเบื้องต้นและการกู้ชีพที่ศูนย์ฝึกสุนัขแล้วพบว่าปัญหาที่พบบ่อยมักเกิดจากเรื่องกล้ามเนื้อและข้อเป็นจำนวนมาก และสิ่งที่สำคัญคือการที่สัตวแพทย์ไม่สามารถสื่อสารกับเจ้าของสุนัขได้อย่างเข้าใจเวลาพบปัญหาได้เพราะมองไม่เห็นภาพร่วมกัน ส่วนใหญ่สุนัขมีปัญหาเรื่องการงอเหยียดได้ไม่เต็มที่ ร่วมกับสุนัขมีความเจ็บปวด ไม่สามารถมองเห็นได้ว่าเกิดขึ้นตรงไหน แต่หุ่นสามารถบอกได้เลยว่าตรงไหนมีปัญหา อนาคตอาจารย์ได้รับเชิญให้นำหุ่นไปใช้กับกลุ่มสุนัขกู้ภัย (K9 USAR Thailand) เพื่อช่วยในการเสริมสร้างกล้ามเนื้อจากการฝึกหนัก และการออกพื้นที่จริง เวลาครูฝึกนำไปบำบัดเสริมสร้างร่างกายจะได้ทำอย่างถูกต้องมากขึ้น”
ผศ.สพ.ญ.ภาวนากล่าวถึงแผนงานในอนาคตว่า “คณะสัตวแพทยศาสตร์ จุฬาฯ มีแผนพัฒนาหุ่นเพื่อการเรียนการสอนให้สามารถต่อยอดในเชิงพาณิชย์โดยร่วมกับบริษัทเอกชนภายนอก โดยปัจจุบันอยู่ในช่วงการบ่มเพาะในการเปิดเป็นบริษัทใช้ชื่อว่า CU Vet Best Model ซึ่งจะเป็น Spin-off ภายใต้การดูแลของ CU Vet Enterprise นอกจากหุ่นสุนัขแล้ว ยังเตรียมขยายผลสู่การสร้างหุ่นจำลองกล้ามเนื้อในแมวและหุ่นกู้ชีพแมวต่อไปในอนาคต”